Great looking motor. Well, I’m thinking something with lots of rotational energy, kinda like Megabyte….
I wonder, though, with 100 kg thrust, if anybody ever tried to put two of this drone motor into a heavyweight class Drone Bot. The question is, what would be the weapon?
We did consider a snubber when having problems with the electromechanical relay. This was an RCD (Resistor-Capacitor-Diode) design which was to suppress the relay arc and ringing, but after careful consideration, we built a custom PWM drive. We tried a snubber at one point with this drive, when a control wire problem caused some instabilities, but didn’t need the snubber after finding the true cause of the problem.
I would definitely recommend one of several kinds of snubbers for anyone using an electromechanical relay, so that the motor leakage inductance doesn’t fry the relay contacts. The most basic is to apply a very large diode in anti-parallel with the motor, to provide a path for the freewheeling current. If you want, I can send you an LTSpice simulation for that diode when used with an ETEK motor! Just drop a line to me at ml@Ieee.org. Put in the keyword “megabyte” so the email doesn’t go to spam. I’d love to hear from you.
And yeah, there’s alot of ringing and noise in the PWM drives, which would imply some noise / interference issues that you might want to use a capacitive snubber to dampen.
One thing I’ve found as well, is that these spikes are far worse if your PWM drive is a long way from your battery pack, just due to leakage inductance in the power leads (!). I’ve got some simulations for that, too, and it helps you to size the PWM drive filter capacitor bank.
Megabyte of the 2000s seemed extremely robust, reliable and heavy hitting. Your latest bots still hit hard but seem less reliable, what’s happened? Stronger opponents?
Great question, There is a number of reasons, one is definitely the strength of the robots. We spin faster and have bigger hits and we had issues with electronics from 2017-now going through the Old Victors, Rage Bridges, Vex BBs, then finally the Castle Mambas which we now have had 11 fights without a failure, 4 in Battlebots and 7 in King of Bots 2. We also loose spin motor controllers, and before we used a relay. The relay worked fine with NICADs but not so good with LiPos. The NICADs reduced voltage once shorted to the ETEK, and then ramped it self up, but the lipos put out almost infinite current only limited by them blowing up. We used the 6.5AH MAX-Amp 150C, 2 in parallel and the equates to almost 2000 amps before battery damage. This extra power caused relays to weld closed and this is what happened with Invader in our first time back since early 2009. So we developed our own motor controller, which Mike designed. We had both good and bad with the controller, finding bugs in software, but once we got a good software build they seem to be indestructible. We did 7 fights in China at KOB2 and never lost one. We lost 6 of them preparing for fights at Battlebots, which was a disaster. Another failure point is the ETEK motors. Brent has figured out how to harden them and that has been very successful haing 10 fights with one motor without a failure. One of the modification to the ETEK was to increase the distance from the armature to the magnets to give more room for the shock. One failure was the armature hitting the magnets during big shock loads, but the increased distance increased the current for the same torque making the motor get hotter than expected and we burned up the brushes in the 11th fight. We know how to keep the motor cool so that should be behind us now.
The increased spin and increased hit means increase shock and so we went through a number if iteration of shock mounting and shock proofing that was not needed with smaller hits. We even considered slowing down the speed to reduce the shock but that didn’t help with the VEX BBs they were so fragile they broke even while spinning at half speed against Duck in a match last season. But I think we are past all of that with our current Megabyte/Gigabyte robots. We are now working on design weaknesses to deal with the rock scissor paper nature of the sport. I was hoping to get to this point in 2017 but that didn’t happen until recently We are developing different strategies to deal with wedges and Hugh type robots.
Yeah that’s a fair question. And in the face of it, I’m optimistic for us.
I think for one thing, you are right, opponents have gotten tougher and harder – hitting, including Megabyte / Gigabyte, so there is a higher standard of toughness to reach. And opponents have gotten smarter, too, knowing how better to plan their driving. And as we beef up the drive power, the Horiz Spinner can shock itself harder than the opponent (especially when hitting the wall!). Also..
Also, we’ve had some driving and building techniques to learn: First, we used to ramp up to top speed, but eventually found that Megabyte rarely if ever needs to reach top rotational speed to damage an opponent, and it took a few fights to figure that out, meanwhile causing more damage to our own Bot as we often ricosheted off the arena wall. Secondly, we went through a period of making little tweaks, such as changing motor drives and finding a good shock mounting method, some of which failed. Every tiny design change always takes awhile to work out the bugs, and it’s really hard to test ’em until you get to an actual fight. And yeah, we found out to very careful when choosing a supplier for the main spindle! (If you aren’t, Tombstone may show you the error of your ways) I guess my sunny outlook from all this stems from seeing Megabyte getting smarter and stronger with every fight.
Keaton,
We have never built a beetle weight and so do not have the needed experience to give a good answer. I would find the beetleweight teams that do well, and ask them what they use as a starting point. One thing I have realized after building for so many years the most builders are very helpful to others to help find the best components and best methods for building.
Send me your address I will send you some stickers for being the first person to ask a question.
The web page still has issues and these question and answers to not appear, that will be fixed soon.
I would suggest 22:1 silver sparks from fingertech as a budget option, an endbots DESC is capable of running 4 of them for 3 minutes or so at 3s.
Beyond that, many beetles are now using special brushless drive, check out OWObotics’s site, they are making some ready-made custom ones, though not sure if they ship globally. Those let you put 4s-6s in your beetle.
As for the weapon, a 4008 multistar is typical for horizontal spinners, and vertical spinners typically run a 540- size inrunner or 2836 propdrive outrunner.
Thanks Socorro, all humans should aspire to actually Drive a heavyweight Bot in the arena, not just build it. I will let you know when I achieve that state of enlightenment and share the transcendant glow with you.
I have a question on using two or more motors to power a single spinning weapon. Is synchronization issues actually a thing that will decrease the overall power (compared to simply multiplying the power by two)? If so, how can one mitigate it? Does connecting each individual motor to the weapon with a separate belt help?
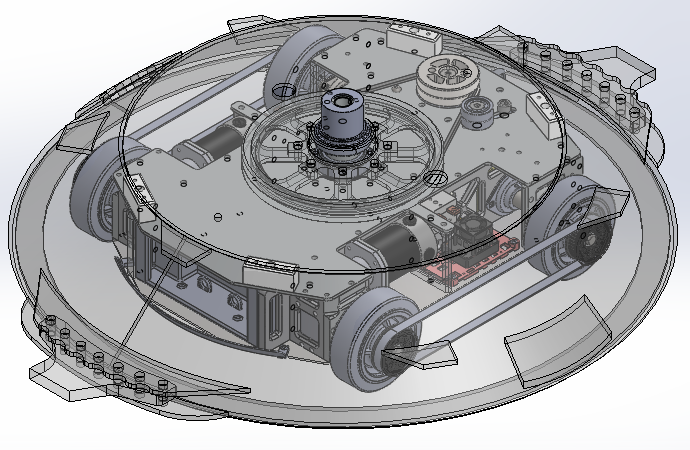
We have avoided using more than a single motor so far. We are looking into possibly using multiple Brushless motors for spin in the future, but are hesitant because of the added complexity and possible reliability issues. It has taken us a long time to get the current Classic ETEK design single motor system reliable. I would hate to make a change and then to have to start all over to evolve to a reliable spin. Other have done it, Shrederator has a 4 Brushless motor spin, and there were a few Chinese clones with a 6 brushless motor spin, all with some reliability problems. Brian of team Logicom used right angle gear boxes to translate a vertical rotation to horizontal, the chinese spinners positioned the motors horizontally and used gears to drive a large gear attached to the shell. Brian’s system was the lowest I have ever seen, the chinese ware a bit higher off the ground but both spun up really fast in tests. I really love Brians designs, they are cutting edge, I wish he would fix his reliability problems, Shred would be a force to be reckoned with if and when he does.
Great question Michael, I think John has addressed much of your question with some perspective on other horizontal spinners out there. WRT synchronization issues, I wouldn’t think that sync would be a problem unless you used a single commutation phase to drive different brushless motors. Of course, we use DC Brush, and there would be no such issue for us. So, whether DC Brush or Brushless, there’s probably a way to use multiple motors. One point of practical concern – I (as you seem to imply as well) prefer a belt drive over gear or chain drives in a Bot that causes more shock loading to itself than the the opponent (or the wall!). The big hits propagate back up through a gear train, and can mess up the gears and motors, (and the rest of the Bot) whereas the belt slips or stretches a bit under shock. I’d also just use a separate belt for each of several motors.
To illustrate my own intuition here, if you have two or more identical (let’s say DC brush) motors connected to the shell, each should deliver torque proportional to its drive current, and make an equal contribution to the torque. Yeah, as you imply, I think you will see some variation in torque (“torque ripple”) which would at times cancel out or reinforce based on relative phase as the belts slip a bit, but this isn’t an issue at all; You’ve got a huge angular moment in the shell which smooths out any ripple effects, especially as they occur at a pretty high frequency relative to shell spin frequency. And yeah, if you used some of the high torque brushless where you can feel the cogging torque, you’d have individual torque ripples which can get pretty high, but again, that gets smoothed out beautifully by the shell momentum.
Hey Mike, this is a test comment to kick things off. What voltage and current can your shell spin controller provide to the motor? Is it a bidirectional motor controller? What kind of motor can it drive, brushless or DC brush?
Max voltage is 60V, and maximum current tolerance depends on the duration. Current spikes can reach 2000 Amps momentarily. The controller runs only one direction, and drives Brush DC motors only.
We deliberately made the controller as simple as possible, knowing that we were pushing the envelope for lots of current in a compact unit.
No way man, not the version that drives the robot by itself. The AI processor module keeps wanting to obey state of california traffic laws, while the politically correct interface (PCI module) prevents us from bumping into smaller Bots.
So I’ve been a huge fan of full-body spinners and, when I enter Battlebots, I do plan on making one. However, I would very much appreciate a little bit of help from (in my [correct] opinion) the best. I guess some questions I have are:
How is Gigabyte’s weapon so powerful?
How can you enhance reliability?
If I’m building a full body spinner, will I have to customize a controller?
Why have a sloped side as opposed to a straight one (like Captain Shrederator)?
What metal should I use for the shell?
I’m sorry about all the questions, I am a little passionate about making a good full body spinner. Thnx!
Nicolas,
Sorry it took so long to respond, I have not checked this page in a long time. DON’T FORGET TO WATCH BATTLEBOTS 2020 ON DEC 3 AT 8PM ON THE DISCOVERY CHANNEL
Q: How is Gigabyte’s weapon so powerful?
A: We use a Brigs and Stratton ETEK motors to spin the 120 pound shell. They are no longer made so after the 2020 season we are moving to the Lynch LEM200 to replace it. We developed our own motor controller that can run at 80V and ouput 2000 amps so we cqan get full power out of the motor. We have no been able to find an off the shelf one that can do what we need.
Q: How can you enhance reliability?
A: It took a few years and many fights in China and the USA to get where we are for Battlebots Season 2020. Shock mount and harden everything. We went through 4 different motors controlled for the drive and they all broke until we found on indestructible. We still had to take it apart and harden it and shock mount it. We continuously changed mounting, components, and design to make it stronger and stronger over time. The basic design from the original CAD did not change that much, but the reliability sure did.
Q: If I’m building a full body spinner, will I have to customize a controller?
A: That is our experience for the weapon, but this depends on how heavy the shell will be. We try to get close to half the weight. Can’t use a contactor because of 2 reasons, the load causes them to fail and they fail shorted, with weapon stuck on. And the instant one causes the bottom to spin under the shell making it not driveable. We developed a 1/4 bridge one directional, no break motor controller that can do exactly what we need. We are in the process of building 100 and hope to have them available before battlebots 2021.
Q: Why have a sloped side as opposed to a straight one (like Captain Shrederator)?
A: Even Shred went to slanted shell lately. I haven’t seen him use the flat shell for over a year in China or Battlebots 2020
When fighting another horizontal spinner his entire hit goes into your robot with a flat side. We first went to the slopped shell after getting our flat shell damaged from Tombstone way back in 2002. Never had that problems again.
Q: What metal should I use for the shell?
A: Good question! My thought on this has changed over the years after using 3 different materials for shells. The very first shells we Aluminum with a flat side, then we went to the slanted Titanium, then we used Hardened Chrome Molly for Super Megabyte, and more recently we made them out of AR500. Al is the worst choice by far even though we won many championships with it. It is cheaper, easier to fabricate. Out first shells out of AL with flat sides, were made in Carl Lewis’s garage, he cut rolled and welded the shell. After Tombstone/Last Rights, we went to a Titanium slanted shell. It lasted over 100 fights from 2003 to 2017 and is not on Brent Riekers wall in his man cave. The AR500 shells are much cheaper to make because of material costs, but they do not hold up like the TI shells. Also the welds on the AR500 shell are stronger and those shells are much easier to repair. The TI welds eventually get weaker and weaker until they can not longer be welded. The material gets brittle and at the end of its life after it was welded to repair damage, as it cooled the welds would just break with loud ping ping ping. But I plant to make a NEW TI shell with improved design to help the weld issue. A 5/16″ thick TI shell will be a few pounds heavier than our light 3/16″ AR500 and 10-15 lighter than the heavy 1/4″ AR500 shell and I think it will be stronger than both of them.
I’m sorry about all the questions, I am a little passionate about making a good full body spinner. Thnx!
No problems I am also passionate about FBS and would love to help you any way I can. Feel free to contact me through email john5957@sbcglobal.net any time for help.













If you had to build a bot using this motor, what kind of bot would it be?
https://alienpowersystem.com/shop/brushless-motors/200mm/aps-20080-outrunner-bldc-motor-50kv-45kw-paramotor/
Great looking motor. Well, I’m thinking something with lots of rotational energy, kinda like Megabyte….
I wonder, though, with 100 kg thrust, if anybody ever tried to put two of this drone motor into a heavyweight class Drone Bot. The question is, what would be the weapon?
How does the snubber work on Megabyte?
We did consider a snubber when having problems with the electromechanical relay. This was an RCD (Resistor-Capacitor-Diode) design which was to suppress the relay arc and ringing, but after careful consideration, we built a custom PWM drive. We tried a snubber at one point with this drive, when a control wire problem caused some instabilities, but didn’t need the snubber after finding the true cause of the problem.
I would definitely recommend one of several kinds of snubbers for anyone using an electromechanical relay, so that the motor leakage inductance doesn’t fry the relay contacts. The most basic is to apply a very large diode in anti-parallel with the motor, to provide a path for the freewheeling current. If you want, I can send you an LTSpice simulation for that diode when used with an ETEK motor! Just drop a line to me at ml@Ieee.org. Put in the keyword “megabyte” so the email doesn’t go to spam. I’d love to hear from you.
And yeah, there’s alot of ringing and noise in the PWM drives, which would imply some noise / interference issues that you might want to use a capacitive snubber to dampen.
One thing I’ve found as well, is that these spikes are far worse if your PWM drive is a long way from your battery pack, just due to leakage inductance in the power leads (!). I’ve got some simulations for that, too, and it helps you to size the PWM drive filter capacitor bank.
Megabyte of the 2000s seemed extremely robust, reliable and heavy hitting. Your latest bots still hit hard but seem less reliable, what’s happened? Stronger opponents?
Great question, There is a number of reasons, one is definitely the strength of the robots. We spin faster and have bigger hits and we had issues with electronics from 2017-now going through the Old Victors, Rage Bridges, Vex BBs, then finally the Castle Mambas which we now have had 11 fights without a failure, 4 in Battlebots and 7 in King of Bots 2. We also loose spin motor controllers, and before we used a relay. The relay worked fine with NICADs but not so good with LiPos. The NICADs reduced voltage once shorted to the ETEK, and then ramped it self up, but the lipos put out almost infinite current only limited by them blowing up. We used the 6.5AH MAX-Amp 150C, 2 in parallel and the equates to almost 2000 amps before battery damage. This extra power caused relays to weld closed and this is what happened with Invader in our first time back since early 2009. So we developed our own motor controller, which Mike designed. We had both good and bad with the controller, finding bugs in software, but once we got a good software build they seem to be indestructible. We did 7 fights in China at KOB2 and never lost one. We lost 6 of them preparing for fights at Battlebots, which was a disaster. Another failure point is the ETEK motors. Brent has figured out how to harden them and that has been very successful haing 10 fights with one motor without a failure. One of the modification to the ETEK was to increase the distance from the armature to the magnets to give more room for the shock. One failure was the armature hitting the magnets during big shock loads, but the increased distance increased the current for the same torque making the motor get hotter than expected and we burned up the brushes in the 11th fight. We know how to keep the motor cool so that should be behind us now.
The increased spin and increased hit means increase shock and so we went through a number if iteration of shock mounting and shock proofing that was not needed with smaller hits. We even considered slowing down the speed to reduce the shock but that didn’t help with the VEX BBs they were so fragile they broke even while spinning at half speed against Duck in a match last season. But I think we are past all of that with our current Megabyte/Gigabyte robots. We are now working on design weaknesses to deal with the rock scissor paper nature of the sport. I was hoping to get to this point in 2017 but that didn’t happen until recently We are developing different strategies to deal with wedges and Hugh type robots.
Yeah that’s a fair question. And in the face of it, I’m optimistic for us.
I think for one thing, you are right, opponents have gotten tougher and harder – hitting, including Megabyte / Gigabyte, so there is a higher standard of toughness to reach. And opponents have gotten smarter, too, knowing how better to plan their driving. And as we beef up the drive power, the Horiz Spinner can shock itself harder than the opponent (especially when hitting the wall!). Also..
Also, we’ve had some driving and building techniques to learn: First, we used to ramp up to top speed, but eventually found that Megabyte rarely if ever needs to reach top rotational speed to damage an opponent, and it took a few fights to figure that out, meanwhile causing more damage to our own Bot as we often ricosheted off the arena wall. Secondly, we went through a period of making little tweaks, such as changing motor drives and finding a good shock mounting method, some of which failed. Every tiny design change always takes awhile to work out the bugs, and it’s really hard to test ’em until you get to an actual fight. And yeah, we found out to very careful when choosing a supplier for the main spindle! (If you aren’t, Tombstone may show you the error of your ways) I guess my sunny outlook from all this stems from seeing Megabyte getting smarter and stronger with every fight.
What motors would you recommend using for a low budget beetleweight? Beginner level would be preferable.
Keaton,
We have never built a beetle weight and so do not have the needed experience to give a good answer. I would find the beetleweight teams that do well, and ask them what they use as a starting point. One thing I have realized after building for so many years the most builders are very helpful to others to help find the best components and best methods for building.
Send me your address I will send you some stickers for being the first person to ask a question.
The web page still has issues and these question and answers to not appear, that will be fixed soon.
I would suggest 22:1 silver sparks from fingertech as a budget option, an endbots DESC is capable of running 4 of them for 3 minutes or so at 3s.
Beyond that, many beetles are now using special brushless drive, check out OWObotics’s site, they are making some ready-made custom ones, though not sure if they ship globally. Those let you put 4s-6s in your beetle.
As for the weapon, a 4008 multistar is typical for horizontal spinners, and vertical spinners typically run a 540- size inrunner or 2836 propdrive outrunner.
Mike what is the meaning of life for us normals?
And what does life mean to the mikes in the world?
Thanks Socorro, all humans should aspire to actually Drive a heavyweight Bot in the arena, not just build it. I will let you know when I achieve that state of enlightenment and share the transcendant glow with you.
Hi Mike,
I have a question on using two or more motors to power a single spinning weapon. Is synchronization issues actually a thing that will decrease the overall power (compared to simply multiplying the power by two)? If so, how can one mitigate it? Does connecting each individual motor to the weapon with a separate belt help?
Thanks,
Michael
Michael,
We have avoided using more than a single motor so far. We are looking into possibly using multiple Brushless motors for spin in the future, but are hesitant because of the added complexity and possible reliability issues. It has taken us a long time to get the current Classic ETEK design single motor system reliable. I would hate to make a change and then to have to start all over to evolve to a reliable spin. Other have done it, Shrederator has a 4 Brushless motor spin, and there were a few Chinese clones with a 6 brushless motor spin, all with some reliability problems. Brian of team Logicom used right angle gear boxes to translate a vertical rotation to horizontal, the chinese spinners positioned the motors horizontally and used gears to drive a large gear attached to the shell. Brian’s system was the lowest I have ever seen, the chinese ware a bit higher off the ground but both spun up really fast in tests. I really love Brians designs, they are cutting edge, I wish he would fix his reliability problems, Shred would be a force to be reckoned with if and when he does.
Great question Michael, I think John has addressed much of your question with some perspective on other horizontal spinners out there. WRT synchronization issues, I wouldn’t think that sync would be a problem unless you used a single commutation phase to drive different brushless motors. Of course, we use DC Brush, and there would be no such issue for us. So, whether DC Brush or Brushless, there’s probably a way to use multiple motors. One point of practical concern – I (as you seem to imply as well) prefer a belt drive over gear or chain drives in a Bot that causes more shock loading to itself than the the opponent (or the wall!). The big hits propagate back up through a gear train, and can mess up the gears and motors, (and the rest of the Bot) whereas the belt slips or stretches a bit under shock. I’d also just use a separate belt for each of several motors.
To illustrate my own intuition here, if you have two or more identical (let’s say DC brush) motors connected to the shell, each should deliver torque proportional to its drive current, and make an equal contribution to the torque. Yeah, as you imply, I think you will see some variation in torque (“torque ripple”) which would at times cancel out or reinforce based on relative phase as the belts slip a bit, but this isn’t an issue at all; You’ve got a huge angular moment in the shell which smooths out any ripple effects, especially as they occur at a pretty high frequency relative to shell spin frequency. And yeah, if you used some of the high torque brushless where you can feel the cogging torque, you’d have individual torque ripples which can get pretty high, but again, that gets smoothed out beautifully by the shell momentum.
Hey Mike, this is a test comment to kick things off. What voltage and current can your shell spin controller provide to the motor? Is it a bidirectional motor controller? What kind of motor can it drive, brushless or DC brush?
Max voltage is 60V, and maximum current tolerance depends on the duration. Current spikes can reach 2000 Amps momentarily. The controller runs only one direction, and drives Brush DC motors only.
We deliberately made the controller as simple as possible, knowing that we were pushing the envelope for lots of current in a compact unit.
Hey Mike, have you gotten the software revisions under control?
No way man, not the version that drives the robot by itself. The AI processor module keeps wanting to obey state of california traffic laws, while the politically correct interface (PCI module) prevents us from bumping into smaller Bots.
Hello,
Where can I get one of those Meaner Than an Ex Wife polos?
thanks
XO
So I’ve been a huge fan of full-body spinners and, when I enter Battlebots, I do plan on making one. However, I would very much appreciate a little bit of help from (in my [correct] opinion) the best. I guess some questions I have are:
How is Gigabyte’s weapon so powerful?
How can you enhance reliability?
If I’m building a full body spinner, will I have to customize a controller?
Why have a sloped side as opposed to a straight one (like Captain Shrederator)?
What metal should I use for the shell?
I’m sorry about all the questions, I am a little passionate about making a good full body spinner. Thnx!
Nicolas,
Sorry it took so long to respond, I have not checked this page in a long time. DON’T FORGET TO WATCH BATTLEBOTS 2020 ON DEC 3 AT 8PM ON THE DISCOVERY CHANNEL
Q: How is Gigabyte’s weapon so powerful?
A: We use a Brigs and Stratton ETEK motors to spin the 120 pound shell. They are no longer made so after the 2020 season we are moving to the Lynch LEM200 to replace it. We developed our own motor controller that can run at 80V and ouput 2000 amps so we cqan get full power out of the motor. We have no been able to find an off the shelf one that can do what we need.
Q: How can you enhance reliability?
A: It took a few years and many fights in China and the USA to get where we are for Battlebots Season 2020. Shock mount and harden everything. We went through 4 different motors controlled for the drive and they all broke until we found on indestructible. We still had to take it apart and harden it and shock mount it. We continuously changed mounting, components, and design to make it stronger and stronger over time. The basic design from the original CAD did not change that much, but the reliability sure did.
Q: If I’m building a full body spinner, will I have to customize a controller?
A: That is our experience for the weapon, but this depends on how heavy the shell will be. We try to get close to half the weight. Can’t use a contactor because of 2 reasons, the load causes them to fail and they fail shorted, with weapon stuck on. And the instant one causes the bottom to spin under the shell making it not driveable. We developed a 1/4 bridge one directional, no break motor controller that can do exactly what we need. We are in the process of building 100 and hope to have them available before battlebots 2021.
Q: Why have a sloped side as opposed to a straight one (like Captain Shrederator)?
A: Even Shred went to slanted shell lately. I haven’t seen him use the flat shell for over a year in China or Battlebots 2020
When fighting another horizontal spinner his entire hit goes into your robot with a flat side. We first went to the slopped shell after getting our flat shell damaged from Tombstone way back in 2002. Never had that problems again.
Q: What metal should I use for the shell?
A: Good question! My thought on this has changed over the years after using 3 different materials for shells. The very first shells we Aluminum with a flat side, then we went to the slanted Titanium, then we used Hardened Chrome Molly for Super Megabyte, and more recently we made them out of AR500. Al is the worst choice by far even though we won many championships with it. It is cheaper, easier to fabricate. Out first shells out of AL with flat sides, were made in Carl Lewis’s garage, he cut rolled and welded the shell. After Tombstone/Last Rights, we went to a Titanium slanted shell. It lasted over 100 fights from 2003 to 2017 and is not on Brent Riekers wall in his man cave. The AR500 shells are much cheaper to make because of material costs, but they do not hold up like the TI shells. Also the welds on the AR500 shell are stronger and those shells are much easier to repair. The TI welds eventually get weaker and weaker until they can not longer be welded. The material gets brittle and at the end of its life after it was welded to repair damage, as it cooled the welds would just break with loud ping ping ping. But I plant to make a NEW TI shell with improved design to help the weld issue. A 5/16″ thick TI shell will be a few pounds heavier than our light 3/16″ AR500 and 10-15 lighter than the heavy 1/4″ AR500 shell and I think it will be stronger than both of them.
I’m sorry about all the questions, I am a little passionate about making a good full body spinner. Thnx!
No problems I am also passionate about FBS and would love to help you any way I can. Feel free to contact me through email john5957@sbcglobal.net any time for help.
John Mladenik